Dane:
Zauważmy, że położenie początkowe robotów w chwili wynosi:
Zauważmy, że prędkość drugiego robota jest zwrócona przeciwnie do kierunki osi.
Wiemy, że dla ogólnego przypadku równanie ruchu w ruchu jednostajnym ma postać:
gdzie jest położeniem początkowym ciała, jest prędkością ciała, jest czasem ruchu. Zatem dla poszczególnych robotów równania ruchu będą miały postać:
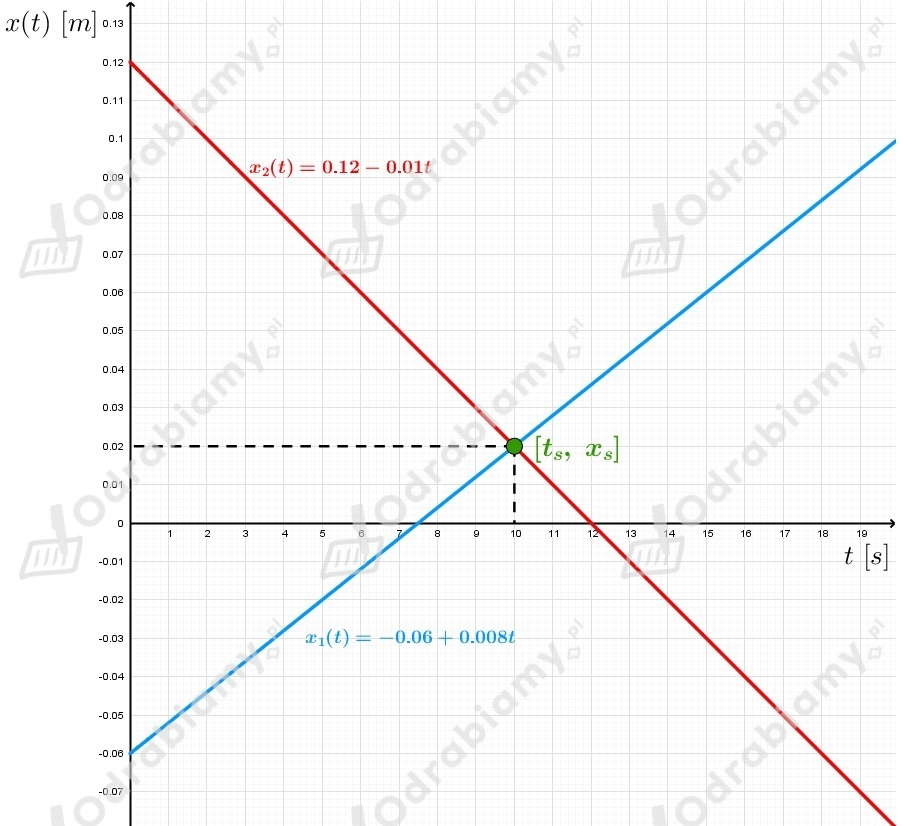
Pomijając podstawowe jednostki SI podstawiamy do wzorów współczynniki liczbowe:
Roboty spotkają się w chwili, gdy ich współrzędne będą takie same, czyli:
Wówczas możemy zauważyć, że:
Pamiętamy, że podstawową jednostką układu SI jest sekunda, czyli czas spotkania robotów to:
Następnie korzystając z dowolnego równania podstawiamy czas do wzoru i otrzymujemy współrzędną położenia robotów w czasie spotkania:
Wiemy, że położenie w podstawowych jednostkach SI wyrażone jest w metrach, czyli współrzędna położenia w czasie spotkania to:
Odpowiedź: Roboty spotkają się po czasie 10 sekund, a ich współrzędna położenia będzie wynosiła 2 cm.
Robot I:
Jeżeli znajduje się on w układzie odniesienia związanym z drugim robotem to jego odległość od drugiego robota wynosi:
Robot pierwszy ma przeciwny zwrot prędkości do prędkości robota drugiego, czyli względna prędkość pierwszego robota względem drugiego będzie miała postać:
Wówczas:
Wówczas równanie ruchu pierwszego robota względem drugiego ma postać:
Robot II:
Jeżeli znajduje się on w układzie odniesienia związanym z pierwszym robotem to jego odległość od pierwszego robota wynosi:
Robot drugi ma przeciwny zwrot prędkości do prędkości robota pierwszego, czyli względna prędkość drugiego robota względem pierwszego będzie miała postać:
Ponadto prędkość drugiego robota jest skierowana przeciwnie do kierunku osi. Wówczas równanie ruchu drugiego robota względem pierwszego ma postać:

Ewelina Wysopal
Nauczycielka fizyki
Zobacz lekcje, które wyjaśnią temat krok po kroku:
Tutaj pojawi się lista Twoich książek
Zaloguj się i zacznij tworzyć ją już teraz.

